Member-only story
ROS stands for Robotic Operating System. This article will act as a tutorial for anyone interested in taking a crash course into the world of ROS. What are we waiting for, let’s dive right in!
Lesson 1: Setting up ROS
The best way to set up ROS is by following the installation tutorial on www.ros.org. The 2 main long term support software available right now are ROS Kinetic Kame and ROS Melodic Morenia. Depending on your Ubuntu distribution, you will have to choose either one. To check your Ubuntu distribution, type:
lsb_release -aIf it shows: Ubuntu 18.04.4 LTS, then you should proceed with ROS Melodic Morenia. If it shows: Ubuntu 16.04 LTS, the proceed with ROS Kinetic Kame. Follow the steps shown in http://wiki.ros.org/ROS/Installation and you should have your ROS distribution up and running in no time. To confirm this, type the following command and you should get the output reflecting your ROS version:
rosversion -d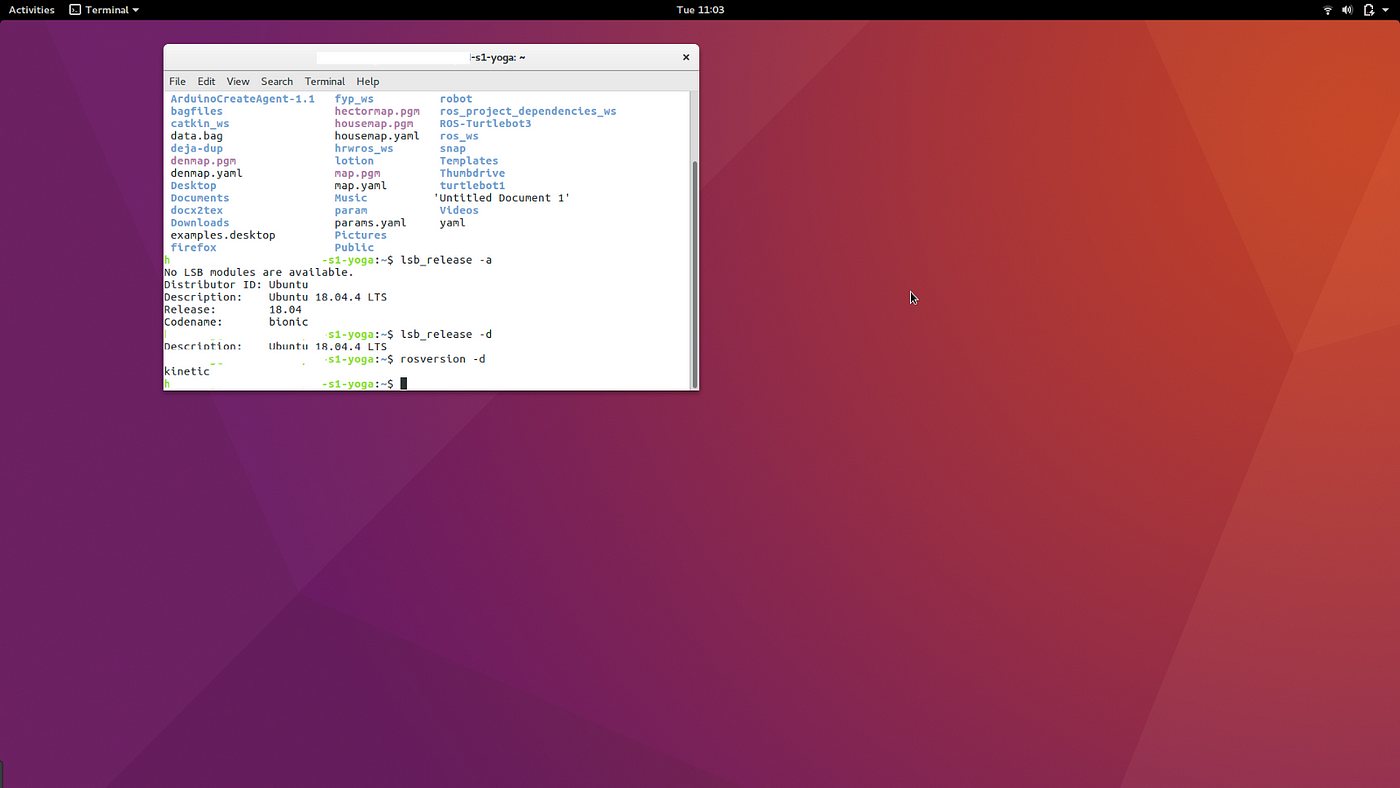
One gripe I had with installing Ubuntu 16.04 on my previous laptop was that the synaptic touchpad tap-to-click was not working anymore compared to my Windows OS. After some digging I found out that Gnome starting…
